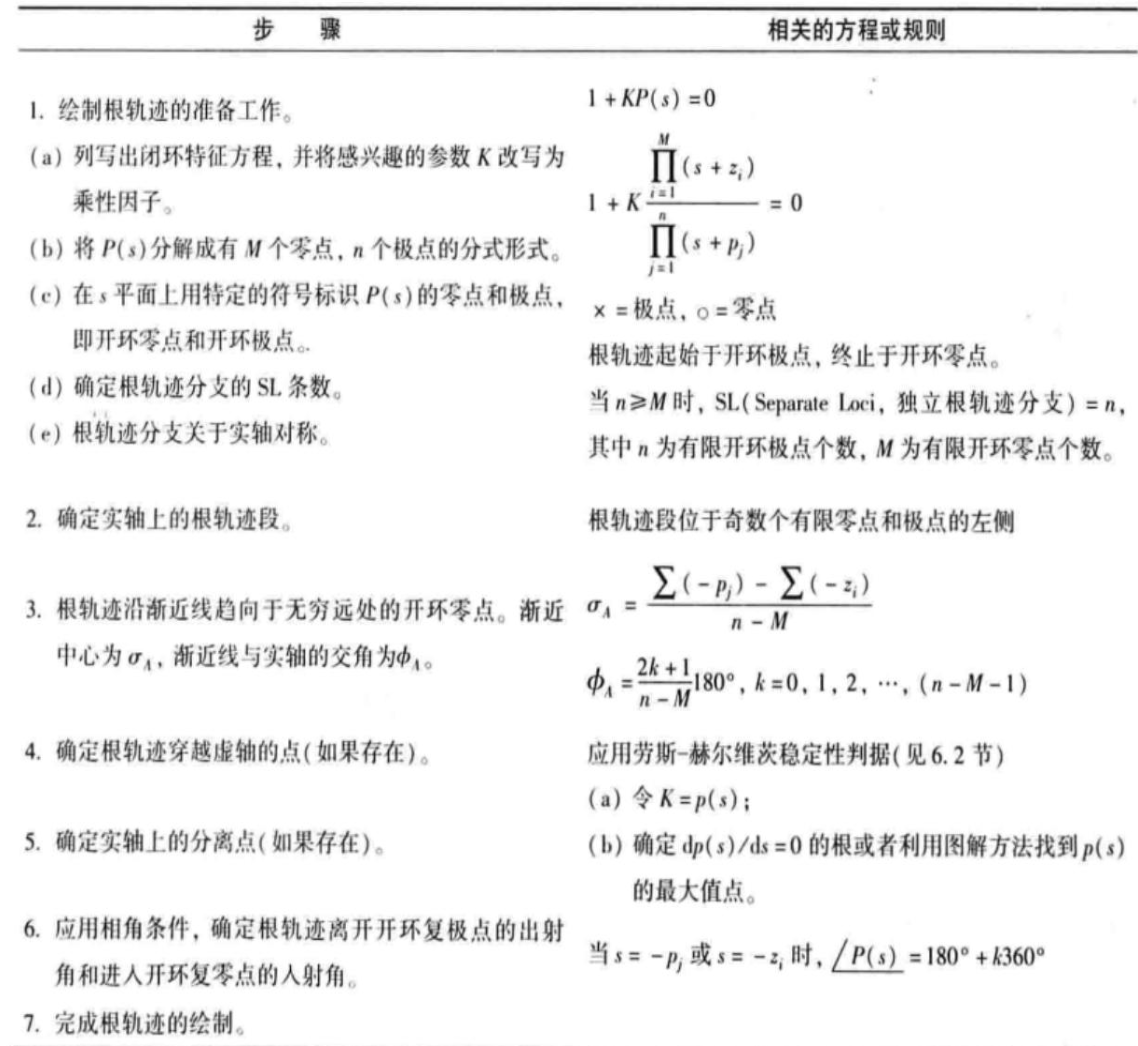
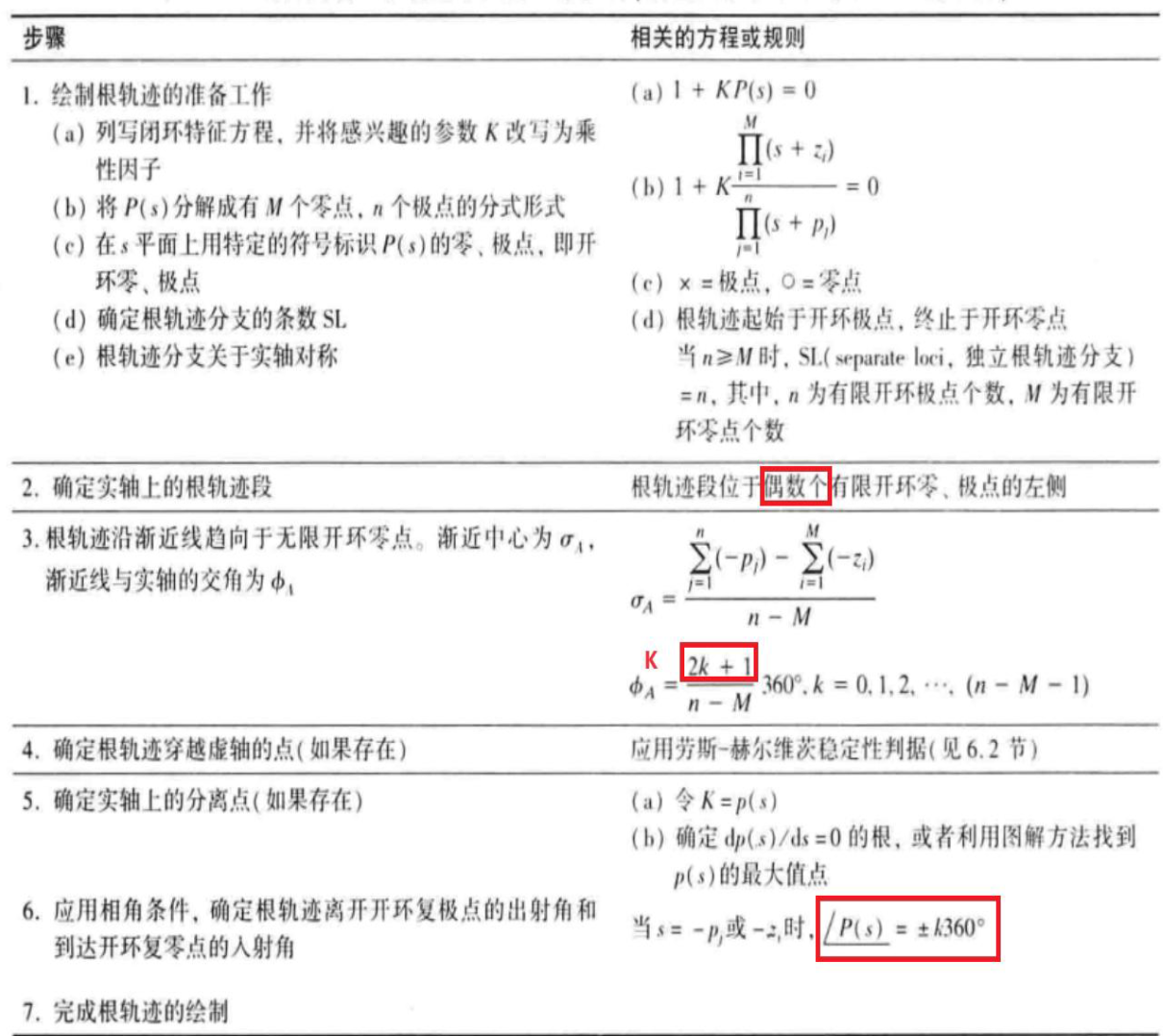
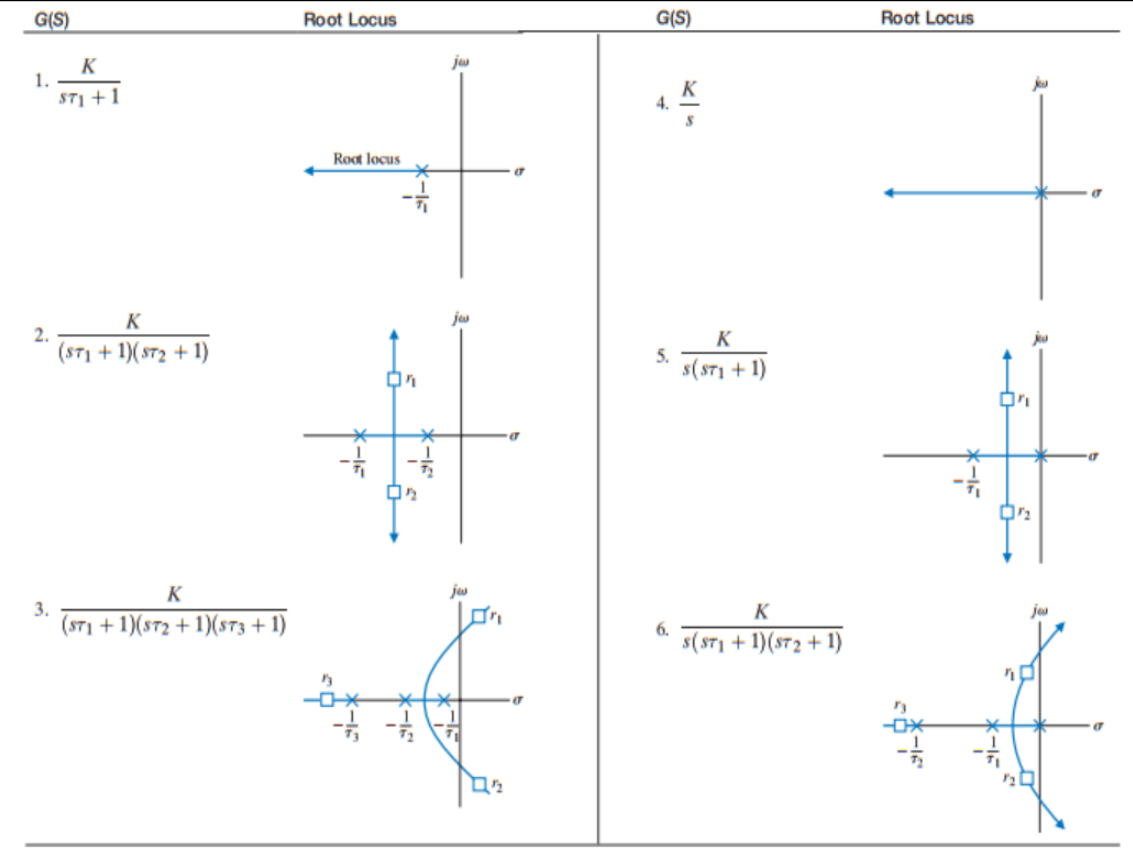
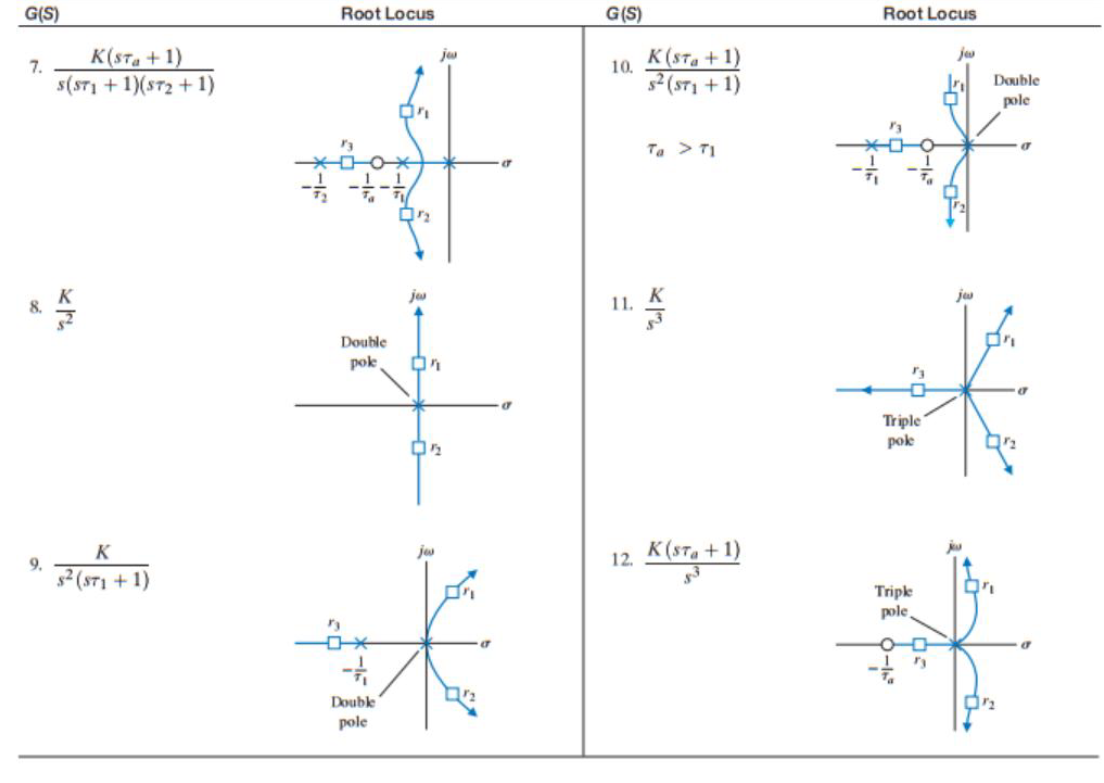
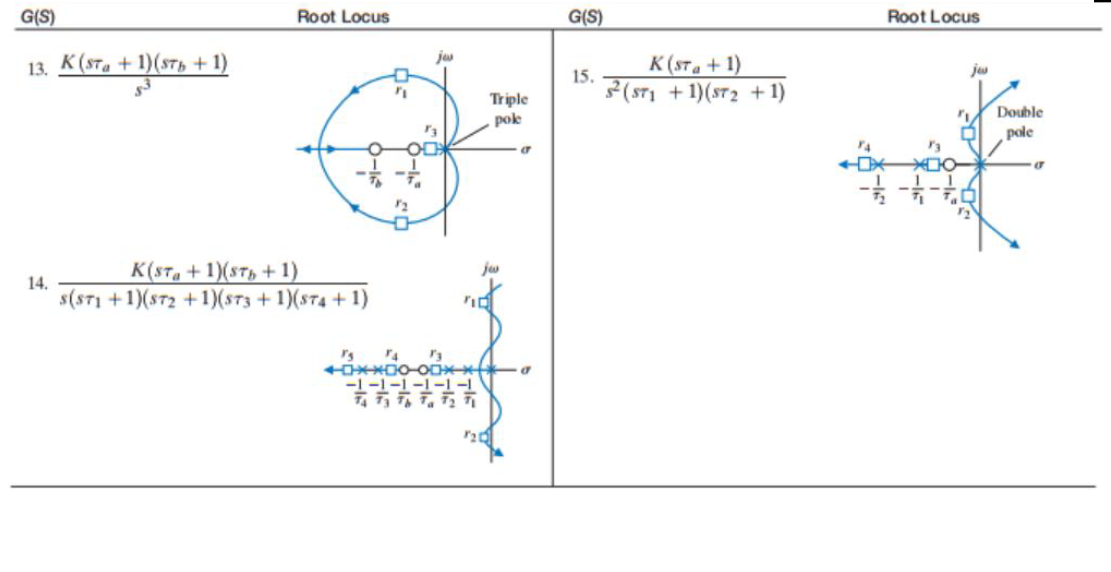
学习文档 自动控制原理 根轨迹法 根轨迹法 绘制步骤 对于求穿过虚轴的点 Routh 表,是特征方程 1+KP(s)=01+KP(s)=01+KP(s)=0 化为多项式构建的,可求出对应的 K 值 具体是让系统临界稳定,可取最后一行为 0,然后求解上一行的辅助多项式=0 的解 直接代入 s=jωs=j\omegas=jω 对于求实轴分离点 $K=p(s),\quad \dfrac{dp(s)}{ds}=0$,解出实数解 对于求复数极零点角度 按照相角条件就行,可现推 负增益情况,标红为区别 常见根轨迹(熟悉即可) Routh-Hurwitz稳定性判据系数集