线性变换
上的线性变换
线性映射维度不限
线性变换必须同维
表示方式
给定运算, 唯一
线性变换
恒等变换
数乘变换
伸缩变换 ,
同构映射 为可逆方阵,
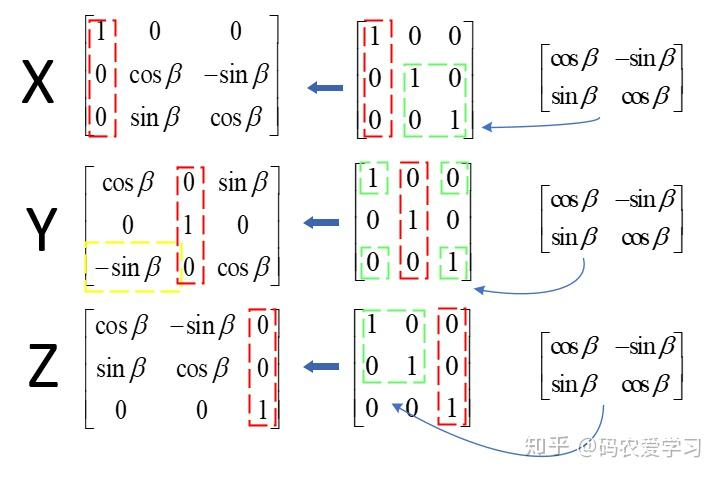
旋转变换,绕原点逆时针转 角,
三维旋转,绕哪个轴旋转,就用二维旋转矩阵替换剩下对应的 4 个位置,注意绕 Y 的 -sinβ位置
错切变换,,c 称为错切因子
线性映射性质
判断变换线性性
有平方项,不线性
,有不受控的常数项,不线性
,由 0 和变量组成,线性
线性变换的复合
等效于矩阵的乘法
线性映射的核与像
考虑
(核空间)
(像空间)
– 映射与核像
联系左乘矩阵 A
特征值与特征向量
特征值可描述矩阵大多数的性质
特征值与特征向量
,
为特征值,可有多个
X 为 A 的属于 的特征向量,一般有无穷多个
已知 X,唯一确定 ;反之不成立
,属于 的特征子空间
* 是核空间,即
特征多项式
求特征值与特征向量
-
特征多项式的根即为
-
解出对应的 (基础解系)
-
对应的特征向量为
特征值目的
解决幂次运算
特征值运算
注意都是 A 和自己运算!!!
矩阵相似
矩阵之间的等价关系的一种
相似性质
以上为相似不变量,不能反推出相似
可对角化条件
A 相似于对角阵
A 有 n 个线性无关的特征向量
A 的不同特征值的特征向量线性无关
n 个不同特征值 → A 相似于对角阵
考虑
P 是特征向量排列
是特征值排列